Meet BlackMax
BlackMax is designed with high-performance expectations in mind. Inspired by real-world motion, it walks on four legs powered by rotational joint motors—no wheels involved. Its sleek, all-black look hides a complex system of Raspberry Pi control, precision motors, and custom circuitry.

From initial sketches to full system integration, we built BlackMax through iterative prototyping:
We focused on real-world functionality. BlackMax is fully walkable and responds to movement commands with stable gait patterns. The final result? A responsive machine built from scratch—combining mechanics, electronics, and intelligent control.
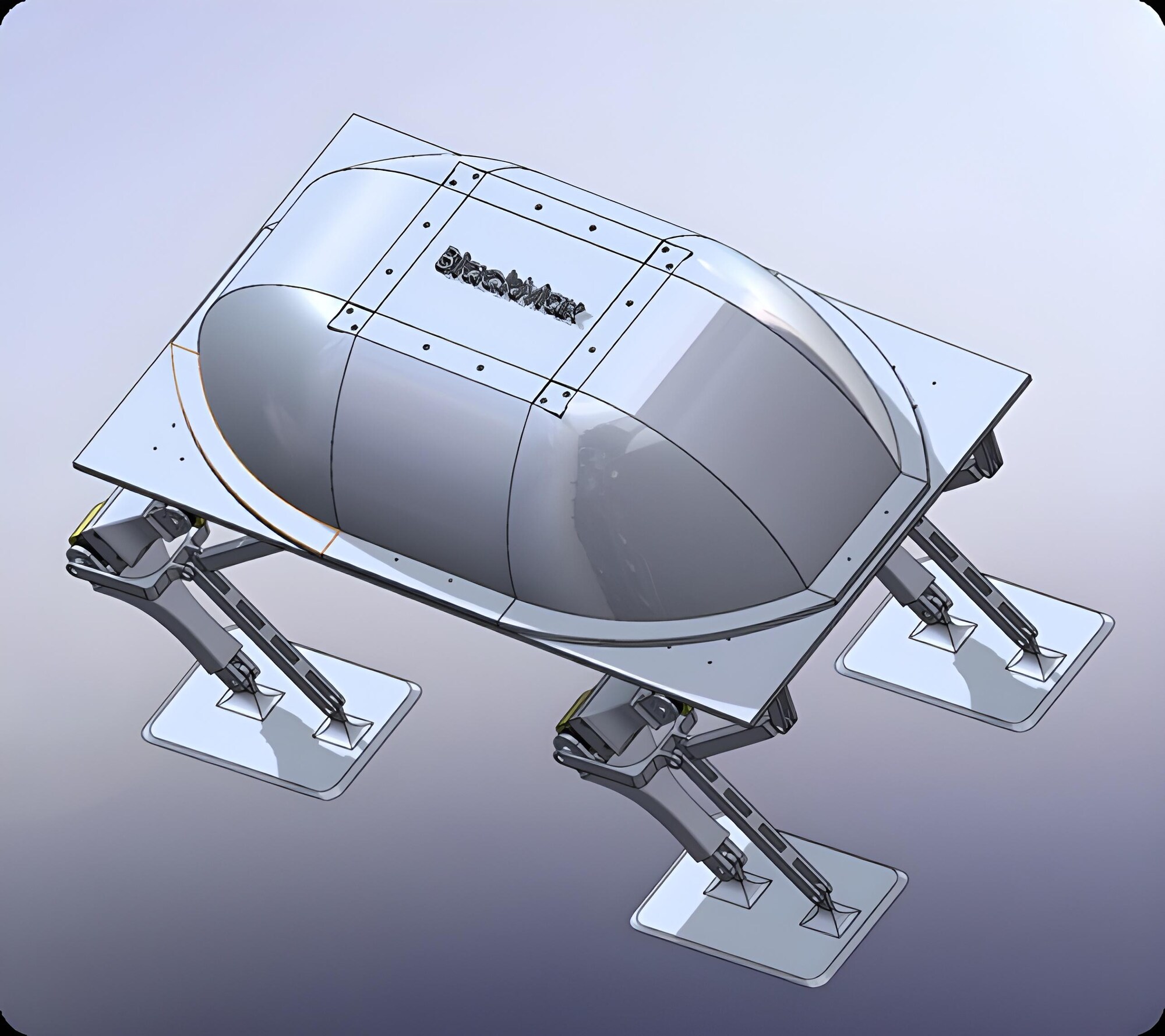
3D modeling in CAD
BlackMax is a fully 3D-printed quadruped robotic prototype designed with an emphasis on mechanical agility, structural balance, and a sleek, cohesive aesthetic. The entire model is constructed using parametric CAD tools to ensure precision, modularity, and ease of iteration.
Embedded Python/C++ control systems
BlackMax is driven by a hybrid Embedded Python and C++ control architecture, carefully engineered for real-time responsiveness and fine-grained control. The C++ layer manages low-level operations such as sensor data acquisition, motor control, and real-time actuation loops—ensuring millisecond-level precision and efficiency. On top of this, Embedded Python provides a flexible scripting environment for higher-level behavior programming, motion planning, and AI-based decision making.


Custom wiring and joint testing
To ensure BlackMax performs with unmatched precision and reliability, we implemented custom wiring tailored specifically to its compact, agile frame. Every wire is meticulously routed to minimize clutter, reduce signal interference, and maximize flexibility—crucial for a quadruped designed to move with fluidity and power.
Final assembly optimized for motion
In its final form, BlackMax is meticulously assembled for peak mobility and mechanical efficiency. Every joint, actuator, and linkage is precision-aligned to minimize friction and maximize responsiveness. The modular servo architecture ensures smooth articulation across all four limbs, while reinforced pivot points allow for high-torque maneuvers without compromising stability.

