Skip to main content
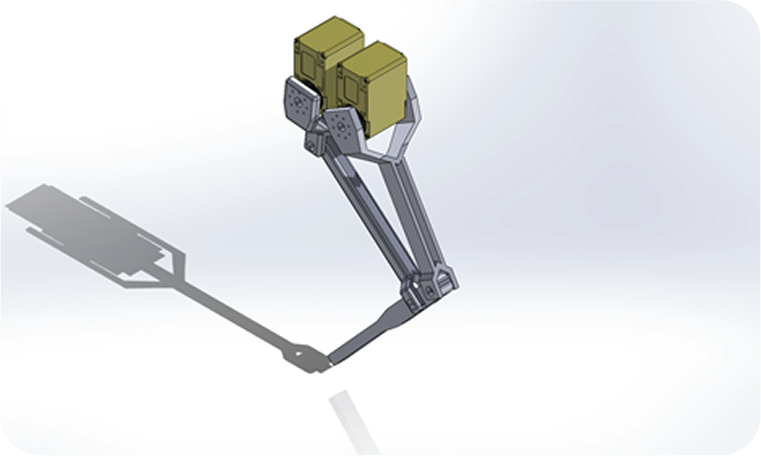
- The robot’s initial limb design lacked structural integrity, particularly in the joints.
- Extremely thin legs and insufficient torque tolerance prevented effective load-bearing and dynamic locomotion.
- Dimensional miscalculations led to non-optimal linkage angles, causing excessive energy consumption and postural instability.
- The limb configuration resulted in unnatural gaits, compromising both aesthetics and balance.
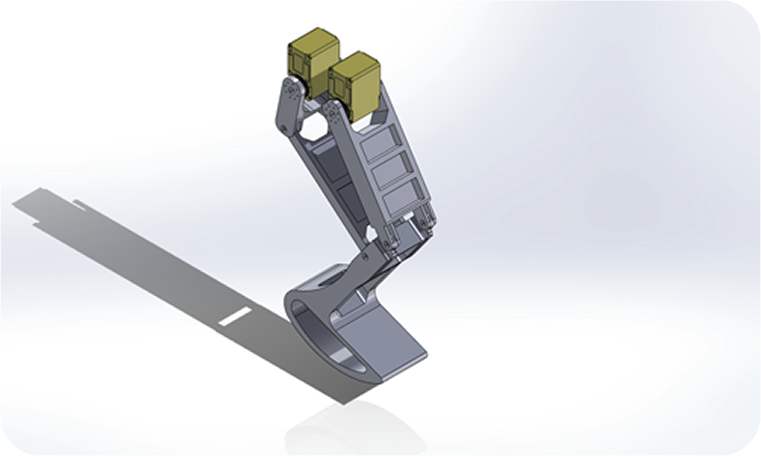
- Introduced an integrated envelope receptacle module—a sealed cavity designed to accept letters, enabling basic human-robot interaction scenarios such as message delivery.
- This adaptation added a layer of real-world utility without compromising gait stability.
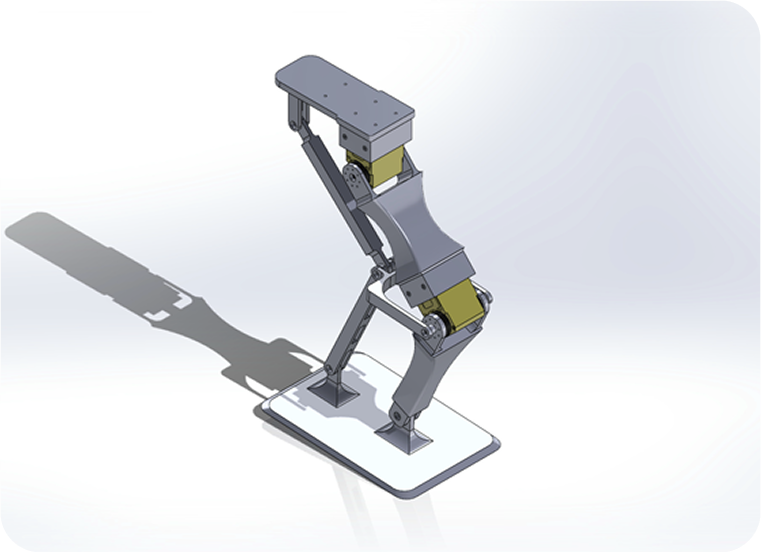
- We pivoted to a serial linkage mechanism, abandoning the prior parallel structure.
- This configuration allowed for torque centralization near the robot’s core, improving power efficiency.
- However, the increased degrees of freedom introduced complexity in gait planning and inverse kinematics, making locomotion harder to control.
- Leg geometry was refined for enhanced ground contact stability and smoother joint articulation.